ロバストパラメータ設計(第二回)
問題の定義
ロバストパラメータ設計の第二回の記事になります。
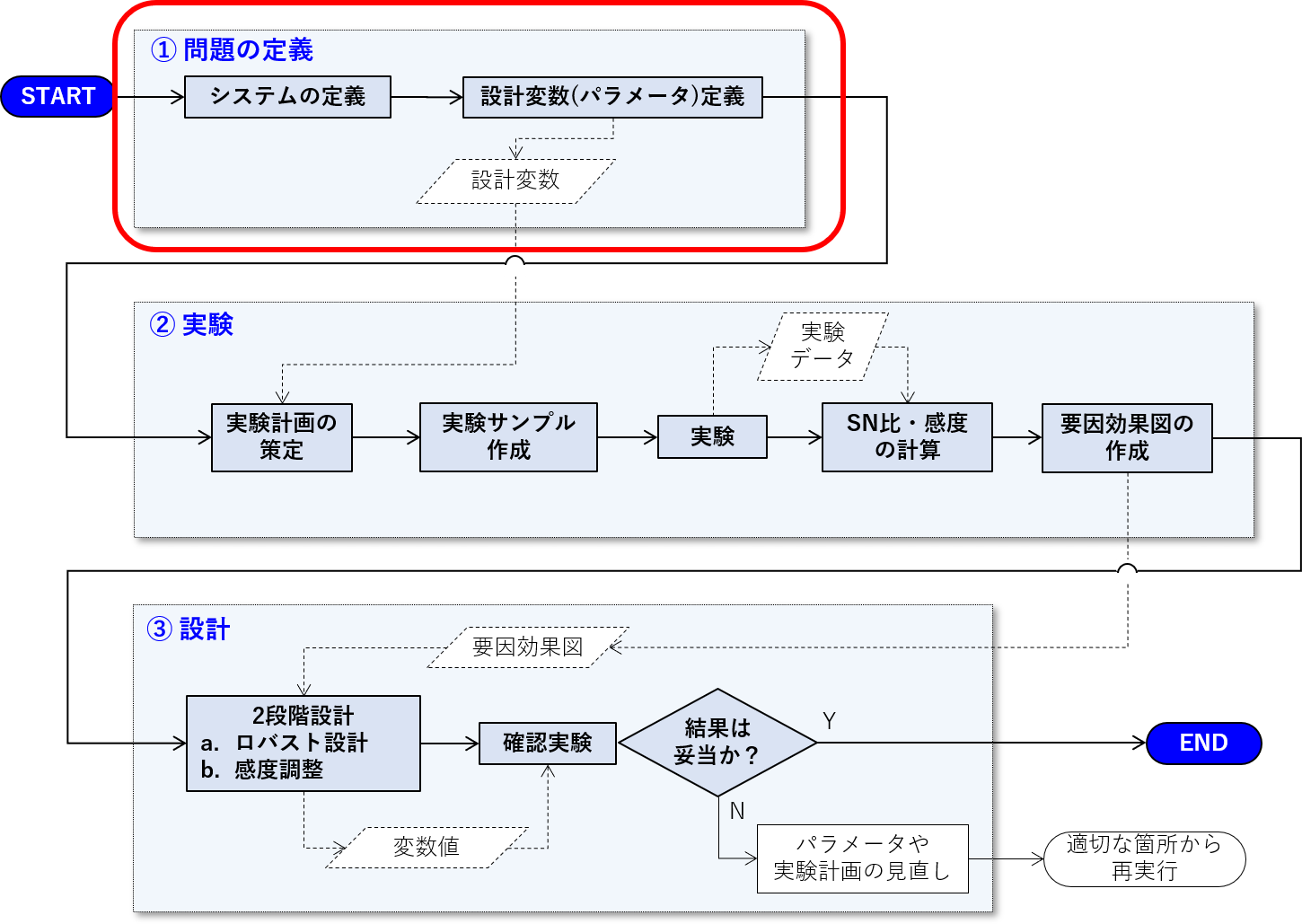
今回は「問題の定義」について説明をします。前回の記事中の作業フローで、下図の赤枠で囲ったところです。
問題の定義について
ロバストパラメータ設計に限らず、数理設計では問題の定義が非常に重要になります。
現代において、ほとんどの数理設計は、計算機で解を求めます。解法(アルゴリズム)自体はシステマティックで、条件などを設定してしまえば、ほぼ自動的に解が出力されます。
そのため、入り口である問題の定義の違いによって、大きく解が違ってくるということが多々ありえます。
そして、計算機はすべてのことを定量的に扱っています。したがって、アルゴリズムに渡す条件は定量的でなければなりません。
設計の実務上では、当然ながら問題の定義は「設計者自身が考える」ことになります。設計者は、設計要求や仕様に基づいて設計作業を行います。それらの設計要求や仕様を、計算機が扱えるように「翻訳」していく作業が、数理設計における「問題の定義」ということになります。
今回の設計対象
最初に、具体的な設計対象を設定します。具体例をもって考えた方が、圧倒的に理解は容易いからです。
今回の設計対象は、下図のような構造物になります。
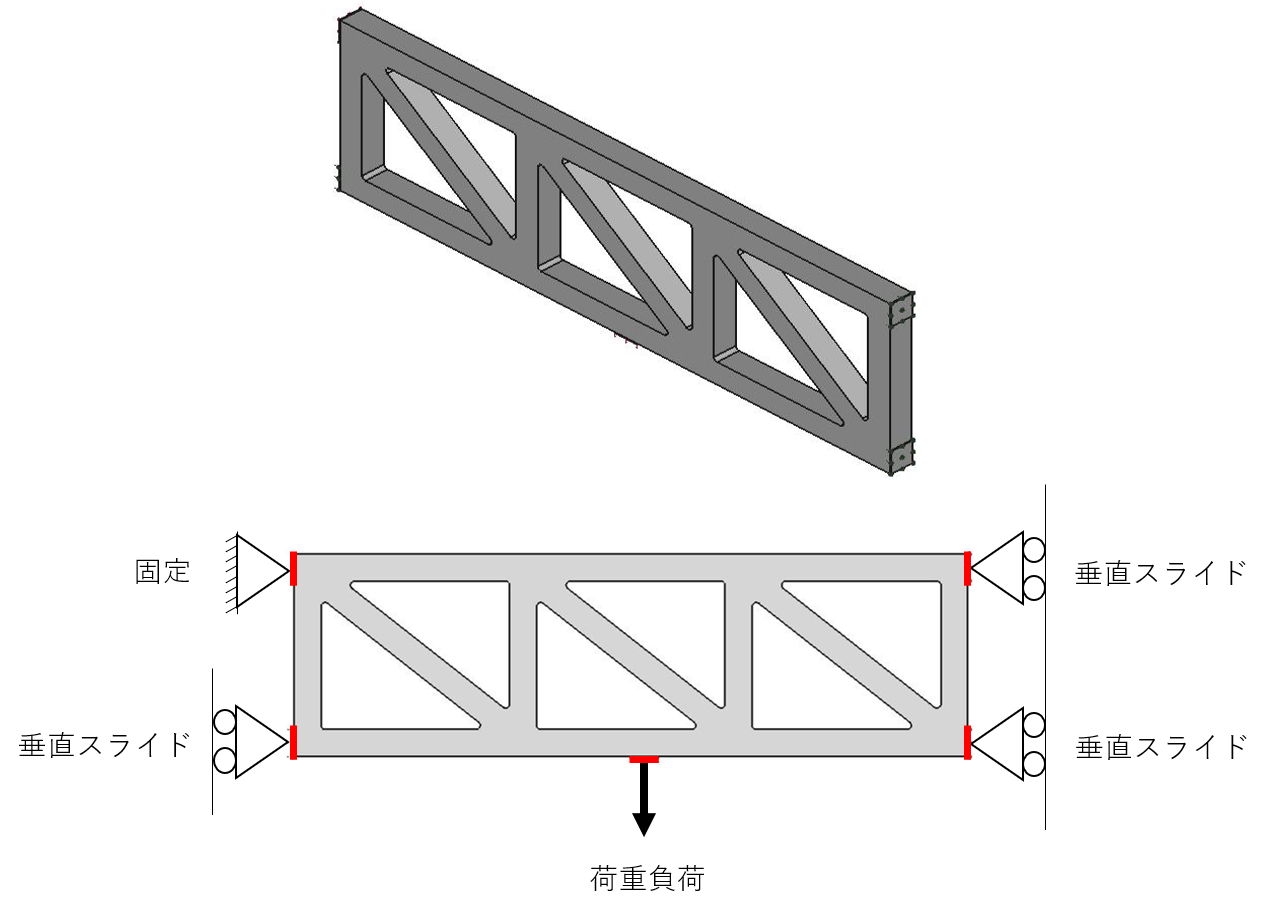
薄い直方体で、肉抜きがされたラーメン構造をしており、四隅で保持されています。
四隅のうち、3つは上下方向のみにスライドできます。レールなどの直動部品で保持されている状態です。残りの1つは、上下方向も拘束されています。ここにブレーキ装置があり、落下を止めている状態となります。
そして、下面中央位置に垂直下向きに荷重が作用しています。何かを吊り下げている状況を想定しています。
このような、上下するクレーンのような構造物について考えていきます。
ロバストパラメータ設計における問題の定義
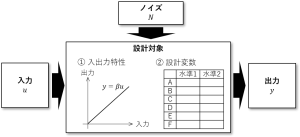
ロバストパラメータ設計におけるシステム図(前回既出)で説明をします。
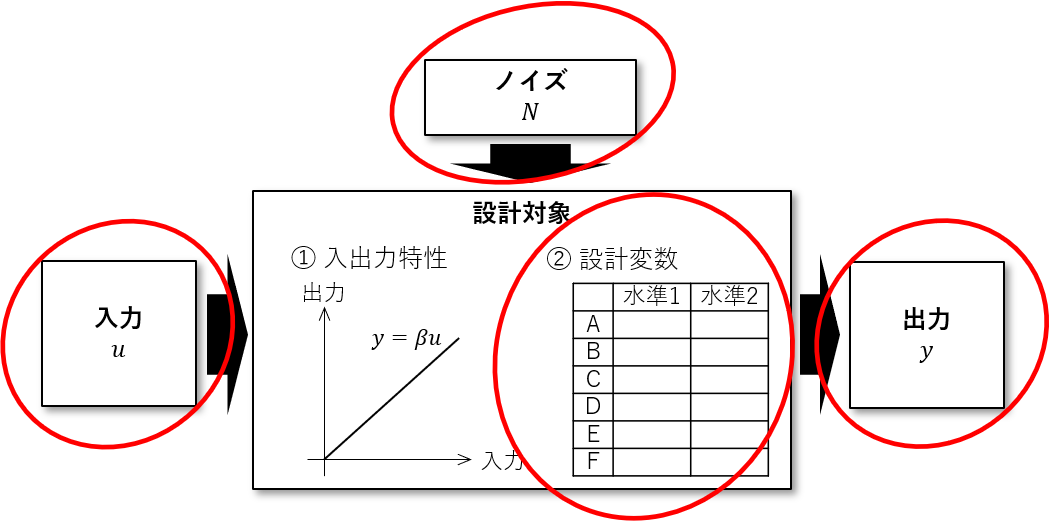
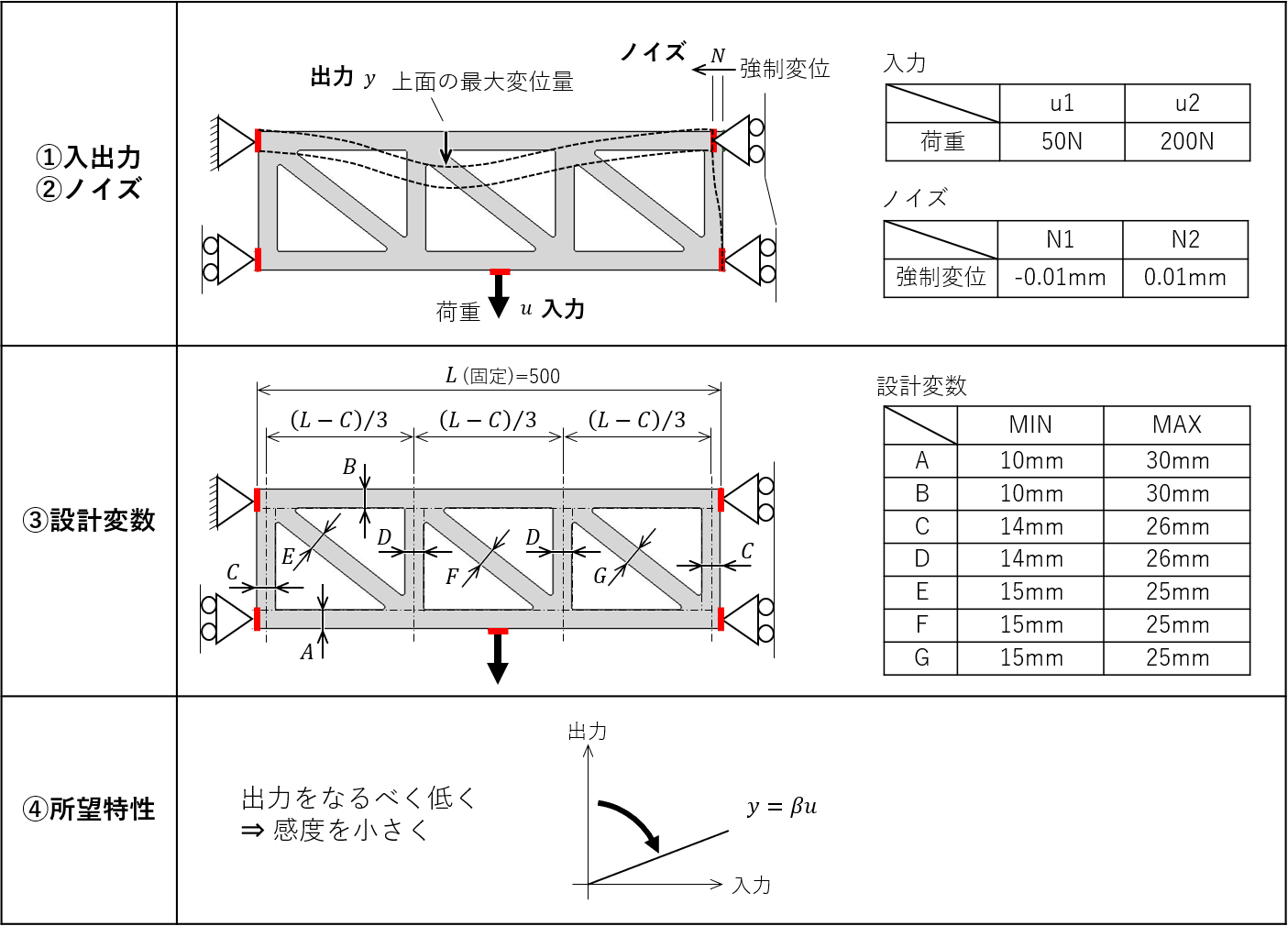
ロバストパラメータ設計における問題の定義は、下図の赤丸で囲ったところの、①入力・出力、②ノイズ、③設計変数の3つと、④所望特性の計4つです。
所望特性とは「出力をどうしたいか」という内容で、設計要求とほぼ同義です。
①入力・出力
最初に、入力と出力を考えます。
設計対象はクレーンとしての機能を持ちます。したがって、入力は吊り下げられる荷の重量、すなわち「下面中央位置に作用する荷重」ということは自然と定まります。荷重は、\(50\sim200[\text{N}]\)の範囲とします。
一方、出力の決め方は多岐に渡ります。設計の目的や要求によって、その都度考えていかなければなりません。今回は、デモ問題ということで、それらについては深く考えていません。
今回は、下図のように、上面の最大変位量を出力として考えることにします。
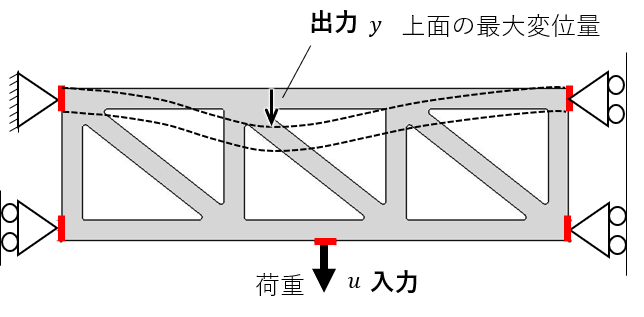
上面の変位を考えるということは、例えば「クレーンの垂直位置をセンシングするための基準面が上面にあり、部材の変形がセンシング結果に影響を与える」という状況が考えられます。
②ノイズ
次にノイズの定義です。
ノイズとは入出力関係を乱すものです。これも設計要求や仕様を参照して決めることになります。分からなければ、設計対象が使われる現場などに赴いて状況を観察するということも有効です。
今回は、次のようにレールの歪みを想定し、右上の固定点の水平方向の変位をノイズとして扱うことにします。
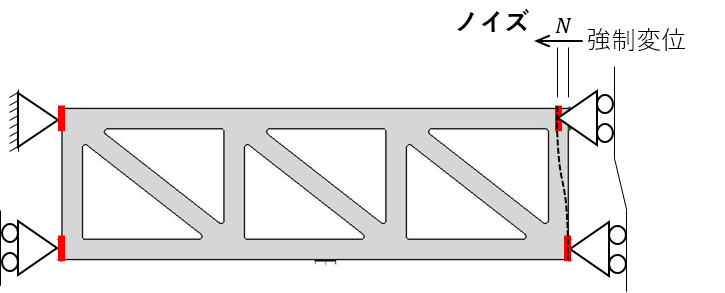
強制変位量は、\(-0.01\sim0.01[\text{mm}]\)の範囲とします。
③設計変数
設計変数とは、所望特性を得るために調整するものです。これをどうするかは、設計者のセンスによるところが大きいです。
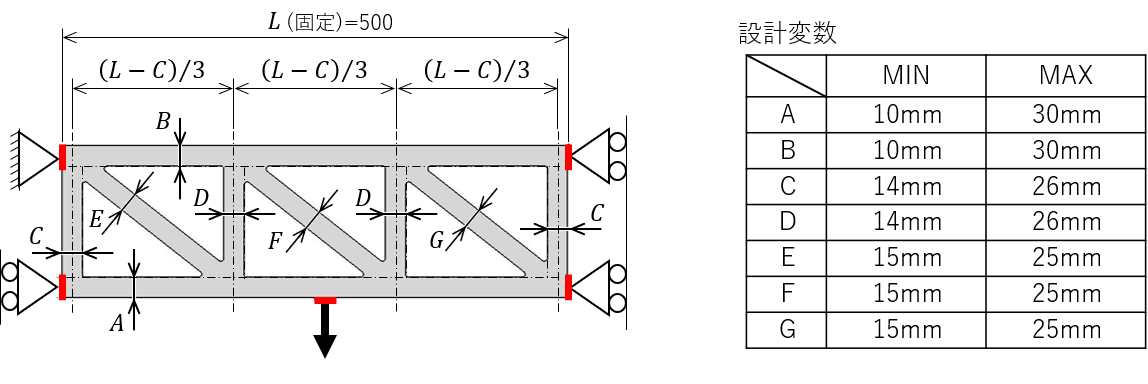
本設計では、下図に示すように\(A{\sim}G\)の各所の寸法値とします。
設計変数の決め方について、セオリーはありません。そもそも、ロバストパラメータ設計は設計変数の値を実験的に定めて行く技法です。何が入出力特性に影響を与えているのかは、分かっていない状況にあるはずです。
大切なのは、技法のセオリーではありません。次回以降で説明しますが、実験(シミュレーション)結果の解釈です。実験結果が希望に沿わない場合は、その原因について考察し、対策を練ることになります。その過程で設計変数の妥当性についても考察の対象になります。
④所望特性
最後に所望特性になります。
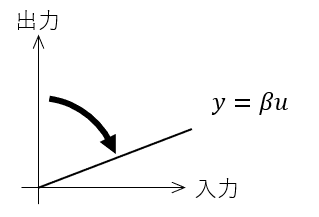
入力・出力の項で、想定状況が出てきたので、今回の所望特性は「出力をなるべく小さくすること」とします。具体的には、入出力特性の傾き(=感度)を小さくすることになります。
まとめ
設計対象について、問題の定義を行いました。結果を下のように一覧化しておきます。
次回は、実験について説明をします。
なお、今回は実験ではなく、構造解析ソフトウェアを用いてのシミュレーションで進めます。